Alumni
Brian LuValle
Bio
Brian Luvalle is an oncoming sophomore at Morristown High School. He was first introduced to Mathematica on a Raspberry Pi in 6th grade where he continuously worked on a CAD program for 3 years. Brian has been an avid participant for his high school's track team (making varsity for the 800) and the Technology student association (qualifying for Nationals for 2019). During freshman year of high school, Brian started to work on writing scientific papers and has been published in the journal Complex Systems. Brian's research has been mainly concerned with the area of complexity science (which he was introduced to in Stephen Wolfram's A New Kind of Science). In his spare time Brian enjoys biking, running, reading, and gaming with friends (Though he might do a little too much of that).
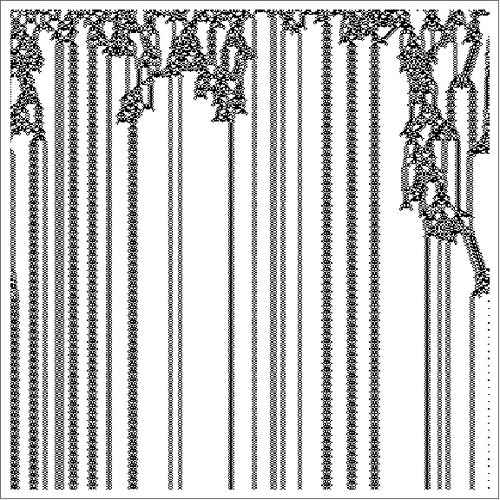
Project: Explore the code 624 Cellular Automaton
Goal
In this project, gliders will be automatically found and their interactions cataloged so that a description of the system's behavior can be composed. This description of behavior will be compared to the universal logical gates and also the network of the universal elementary cellular automaton rule 110's glider interactions. This project can be split into a set of deliverables. First, structures must be isolated from their background pattern; these structures will be taken as structures in a reverse trapezoidal form rather than squares. Second, the average position of the structures with respect to each other will be found. Third, the gliders will be cataloged based on their position, and gliders found next to each other will be cataloged as one single glider. Fourth, at the termination point of each glider, the resulting glider will be searched for and cataloged. Fifth, the catalog of interactions will be reduced and will be pattern matched to see whether it can be equivalent to either universal logical gates or cellular automaton 110's glider interactions. This will be tested on rule 624.
Summary of Results
From this paper, it has been seen that the program has the capability to identify systems of gliders and their respective collisions as well as whether those collision systems are universal or not. However, the tool does not have the capability to find gliders outside of a preselected image. Also, this system lacks the flexibility to find larger gliders automatically; for that, the system needs to be configured. Another problem that exists is the calculation time. This I hope can be solved with better glider-finding algorithms and better glider-comparison algorithms.